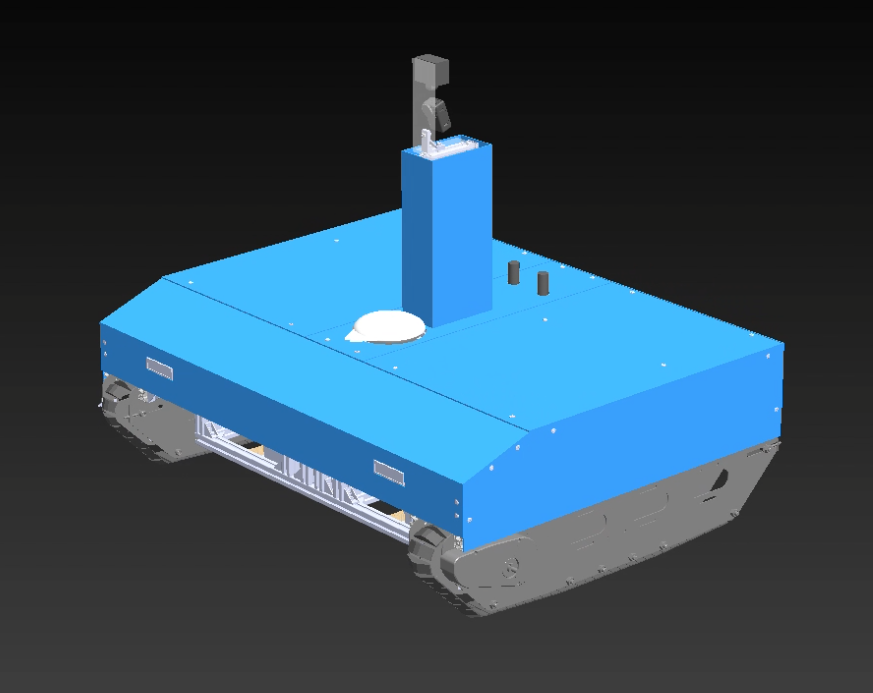
ACRM is an autonomous subsurface exploration robot capable of detecting underground anomalies and hidden structures without excavation.





ACRM reduces the need for human entry into unstable or hazardous areas by automating underground cavity detection and surveying.

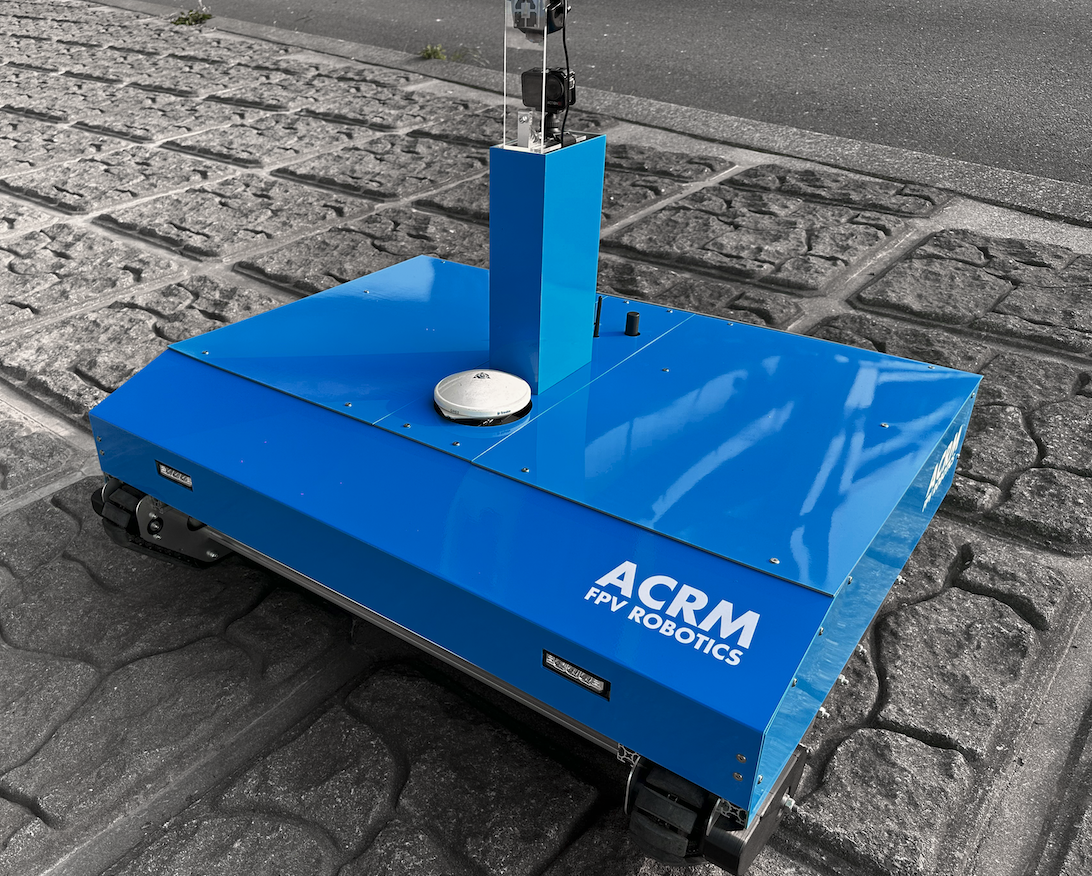
With automated path planning and high-efficiency multi-line scanning, ACRM shortens field operation time and reduces labor costs significantly.

With dual GPR units and AI-assisted analysis, ACRM provides highly reliable cavity detection results with improved spatial precision.